

Dale Click
Hay una pregunta muy común que se suelen hacer a los que estudiamos estas materias:
¿Qué es un vector?
- Es una flecha en el espacio que casualmente tiene una bonita forma matemática.
- Es un conjunto de números que casualmente tienen una bonita visualización gráfica.
- Es algo más…



…. Para que me entiendas, usaremos algo que no es un vector para mucha gente pero tiene varias características interesantes:
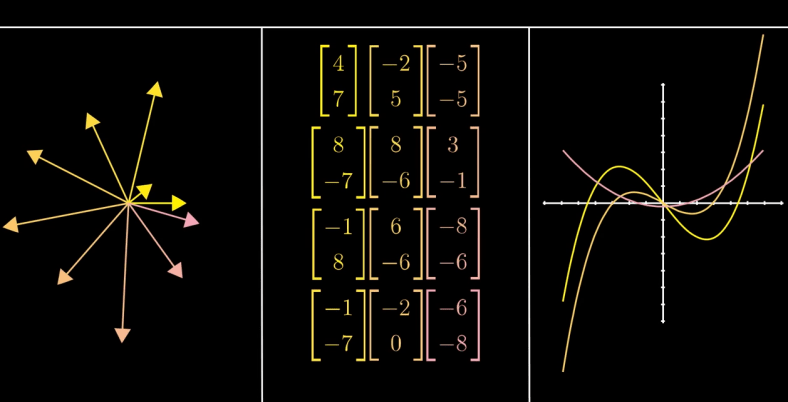
Funciones

Las puedes sumas COMO A LOS VECTORES

Y MULTIPLICAR

INCLUSO PUEDES TENER TRANSFORMACIONES LINEALES
Es más incluso puedes expresar a una derivada como una matriz:

…
Así que a la pregunta:
¿Qué es un vector?
La mejor respuesta que tengo es: Cualquier objeto matemático en el que exista la noción de añadir estos objetos e multiplicarlos por un escalar.
Eso es un vector.
Esto son vectores
Campo
Definición Formal: Un campo K es un conjunto (no vacío) con dos operaciones cerradas, suma y producto, tales que para cualquier 3 elementos se cumplen las siguientes propiedades:

Leyes
Campos Conocidos

Tal vez me recuerdes en campos como:
Algunos campos que quizá conozcas:
- Racionales
- Reales
- Complejos
- Cualquier aritmética modular cuya n sea prima
Algunos conjuntos que «parecen» ser campos pero no lo son son:
- Los enteros
- Naturales
Propiedades Básicas de un Campo
- Los neutros son únicos
- Los inversos son únicos
- Si x+z=y+z, entonces x=y
- Si xz=yz y z no es 0 entonces
- Cualquier elemento por el cero del campo, es si mismo.
- El inverso aditivo de un inverso aditivo de un elemento es ese elemento.
- Si XY= 0, o X o Y es cero.
- El inverso multiplicativo de un inverso multiplicativo de un elemento es ese elemento.
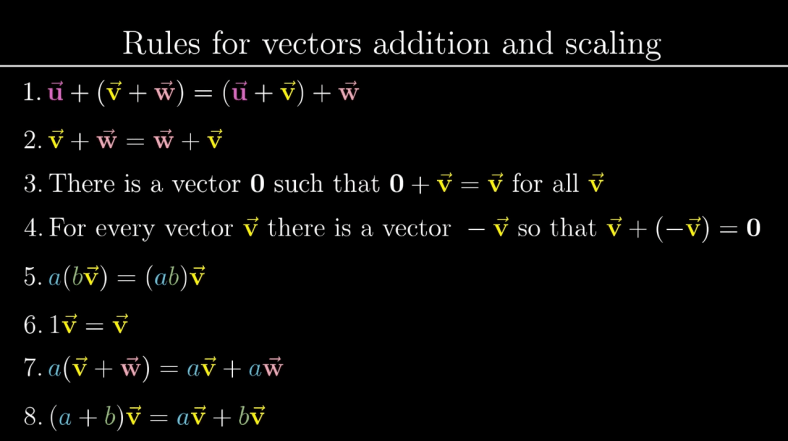
Podemos definir que un Espacio Vectorial tiene que cumplir las siguientes características:

Espacio Vectorial
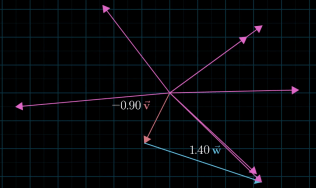
Es más podemos definir un Espacio Vectorial sobre un Campo K cualquiera, como un conjunto no vacío en el que existe algo parecido a sumar, (una operación que recibe dos vectores y te regresa un vector) y multiplicar por un escalar (es decir una operación tal que recibe un vector y un escalar y regresa un vector).
Espacio Vectorial: Cualquier conjunto que obedezca estas normas.
Cortesía de 3Blue1Brown
SubEspacio Vectorial
«Es un subconjunto de un espacio vectorial en la que la suma y el producto por escalares de sus elementos siempre pertenezcan a ese mismo subconjunto»
Que W sea un subespecie vectorial de V quiere decir que W es un espacio vectorial con respecto a K con las operaciones restringidas a W.
Si W no es el conjunto vacío podemos decir que:
- La suma de cualesquiera dos elementos de W esta en W.
- La multiplicación de un escalar con cualquier elemento de W continua estando en W.
O simplificando todo en una ecuación:

Así entonces para probar que algo es un subespacio vectorial hay que bien o probar que la suma y el producto por escalares se mantiene en W o probar la proposición de arriba, como tu quieras.
Propiedades de los SubEspacios
- El subconjunto en el que solo esta el cero vector siempre será un subespacio.
- V es subespacio vectorial de si mismo.
- La intersección de dos subespacios vectoriales es un subespacio.
- El conjunto de todos los elementos de la suma de 2 subespacios vectoriales es un subespacio vectorial.
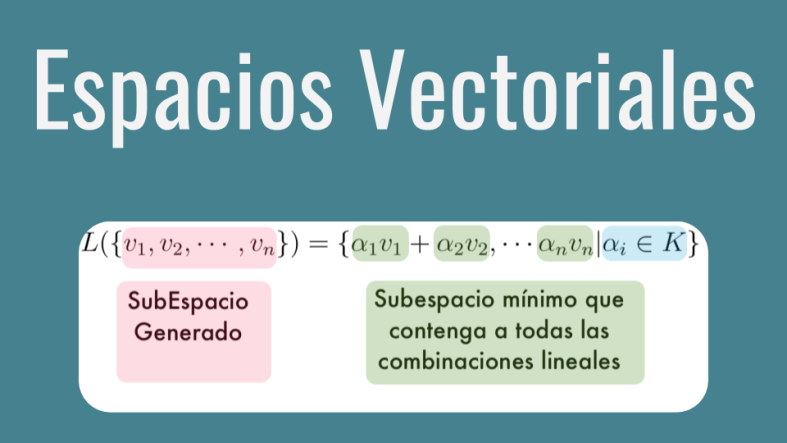
SubEspacios Generados
Un subespacio o espacio generado de un montón de vectores es el espacio vectorial mas pequeño que contiene a todos esos vectores.
O también se puede ver como el conjunto de todas las combinaciones lineales que se puede hacer con estos vectores.
Forma 1

Forma 2
Otra definición de este concepto se puede tener con estas dos ideas:
Con estas condiciones aseguras que subespacio que estas creando es el mas pequeño posible.
Propiedades:
- El Subespacio generado es único
- El Subespacio del vacío es el cero vector
- El Subespacio del Subespacio es el primer Subespacio.
- Si cierto subespacio generado genera al espacio vectorial original, lo seguirá haciendo si le añades cualquier otro vector.
Ejemplos:

Encontrar si son Linealmente Independientes o no
Antes que nada, si, se que no, no encontré ninguna otro titulo que fuera lo suficientemente corto para expresarlo de otra manera.
Aquí la idea es general: Dado un Conjunto de Vectores ¿Son Linealmente Independientes esos vectores, o de otra forma, son Dependientes?
Para encontrar la respuesta solo hay un camino:
Ver si que exista una combinación lineal que de el vector cero implica (osea obliga a que pase) a que tus escalares sean cero.
Graficamente podemos verlo como:

Dame ese sistema

Dime ¿Esta es la única solución?
Tips:
- Dado un sistema de ecuaciones homogéneo si tiene mas incógnitas que ecuaciones el sistema tiene muchas soluciones y por lo tanto el sistema asociado es dependiente.
- Si su determinante es diferente de cero entonces solo tiene la solución trivial y por lo tanto son independiente el sistema asociado.
Propiedades Independencia Lineal:
- Si cierto conjunto de Vectores son Linealmente Independientes, entonces no importa si le quitas un vector al conjunto, seguirá siendo Linealmente Independientes
- Si cierto conjunto de Vector es contienen al cero vector es imposible que sean linealmente independientes.
Base de un Espacio Vectorial
Sea un Espacio Vectorial V, entonces podemos tener un conjunto de vectores de esa V que llamamos Base.
Podemos decir que un Conjunto de Vectores de V es base si y solo si:
- Generan a V
- Son Linealmente Independientes
U otra definición bonita sería:
«Con el Conjunto de Vector Base es el mínimo conjunto en Cardinalidad con el que es posible escribir cualquier vector de V»

Propiedades:
- Todas las bases tiene un la misma cardinalidad, digo, esto es obvio porque la dimensión esta bien definida, es decir es única.
Ejemplos:
Por ejemplo podemos saber que con este conjunto de vectores en R2, podemos crear cualquier vector en 2D

Los Clásicos «i» y «j»

Pero no son únicos, mira :0
Dimensión:
Podemos decir que la dimensión de V es la cantidad mínima de vectores que tendrá una Base que genera a V, osea, que la dimensión es la cantidad de vectores canónicos.
Teoremas Muy Importante:
Sea:

Los siguientes enunciados son equivalentes:
- A es invertible
- F1, F2, F3 … Fn generan a K^n
- C1, C2, C3 … Fn generan a K^n
- F1, F2, F3 … Fn son linealmente independientes
- C1, C2, C3 … Fn son linealmente independientes
- B = {F1, F2, …, Fn} son base de K^n
- B = {C1, C2, …, Cn} son base de K^n
Sea n=dim V
Entonces los siguientes enunciados son equivalentes:
- v1, v2, … vn generan a V
- v1, v2, …vn son linealmente independientes
- B = {v1, v2, v3, … vn} es una base de V
Depurando para llegar a una Base
Supongamos que tenemos un conjunto de vectores con el que podemos generar un Espacio Vectorial, pero la cantidad de vectores en ese conjunto es mayor de la dimensión del Espacio Vectorial, es decir que hay «vectores de sobra».
Para podemos depurar aplicamos el siguiente algoritmo:
- Si es que la cardinalidad el conjunto es mayor a la dimensión de V
- Encontrar el Vector que es Combinación Lineal
- Eliminarlo
- Repite a 1
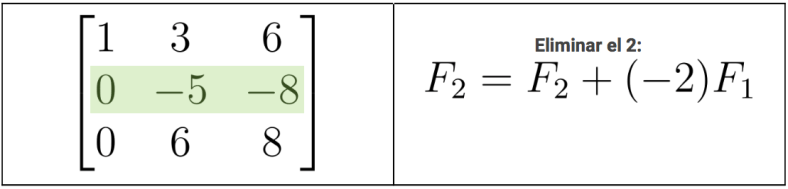
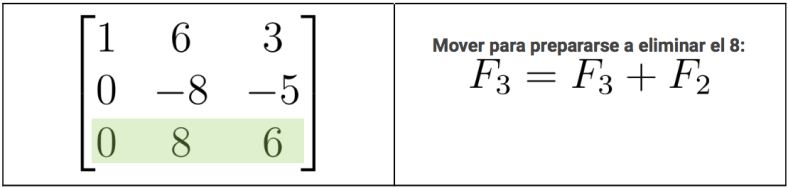
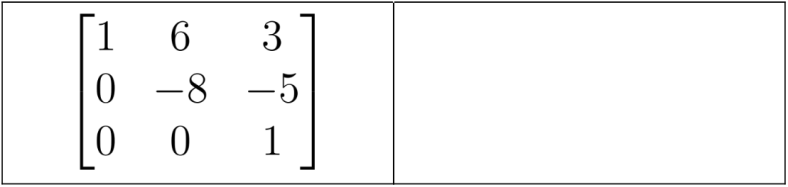
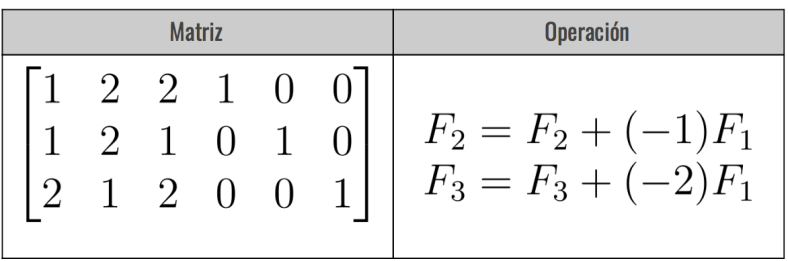
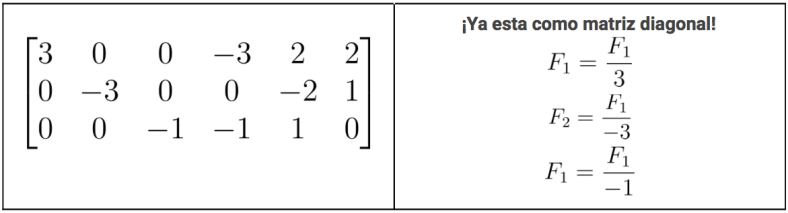
Podemos aplicar Gauss Jordan también, con esto, lo que podemos hacer es:
Generar la matriz que se forma de intentar encontrar el cero vector con todos ellos.
Sistemas d