NOTA: ESTO SOLO SIRVE PARA MATRICES CUADRADAS
Hola, considero muy muy importante que hay hayas entendido como funcionan las matrices gracias a las entradas anteriores porque esto se va a poner bueno :3
El determinante es una herramienta que usamos para entender una propiedad rápida de una transformación lineal: ¿Qué tanto expando o comprime el espacio?
Si lo único que me importará fuera saber si es que mi espacio acaba de «crecer» o «reducirse» usamos los determinantes:
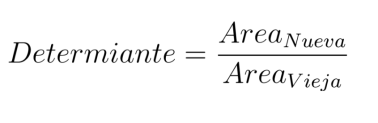
De forma formal (jajaja) podemos definir el determinante como:
«La razón de cambio entre el área de cierto objeto antes y después de la transformación lineal»
Osea, la determinante se puede entender mejor con la pregunta ¿Qué área tendrá un cuadrado de 1×1 tras la transformación lineal?
Por ejemplo el determinante de esta transformación es 6:
Y por más sorprendente que parezca el área en esta transformación no se afecta, es decir el determinante es uno.
Determinante = 0
Así que el determinante valga cero dice que se a ELIMINADO UNA DIMENSION, ES DECIR QUE TIENE AREA = 0 EN 2D, O VOLUMEN = 0 EN 3D.
¿Determinante Negativa?
Simplemente dice que la transformación «giro» el plano, eso es todo.
¿Cómo encuentro el Determinante?
En 2D


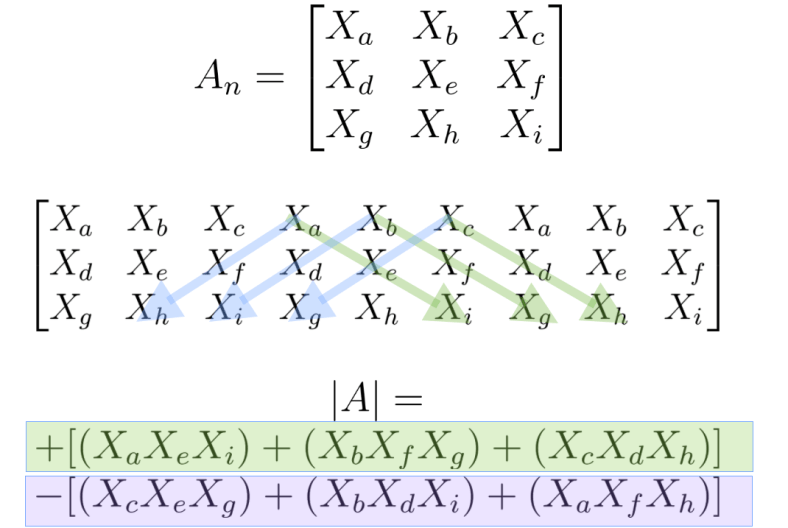
En 3D


Propiedades de los Determinantes
Es muy útil saber sacar el determinante, pero no lo es todo, veamos algunas propiedades:
La Determinante de la Transpuesta es igual que la Original

Transpuestas
Podemos sacar cosas de los Determinantes

Separar de una multiplicación

Sacar un Factor

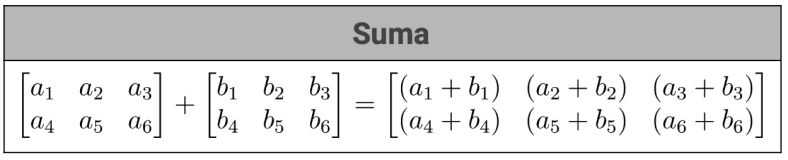
Separar una suma
¿Esta determinante valdrá Cero?
Si dos filas/columnas son proporcionales significa que el determinante valdrá cero:

Si es que existe UNA fila/columna que es combinación lineal de TODAS las demás:

Si existe una fila/columna que sea nula:

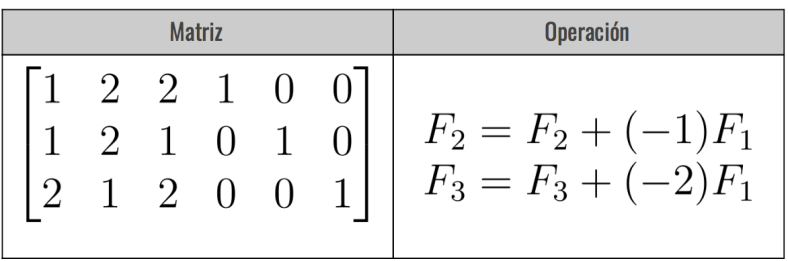
Operaciones Elementales en Matrices
SWAP:
Si intercambio una fila/columna el determinante cambia de signo, pero el valor sigue igual:

Corolario: Si haces un SWAP en la matriz identidad su determinante siempre es -1.
SCALE:
Si escalas una fila o columna el determinante se escala por esa misma cantidad

Ejemplo:

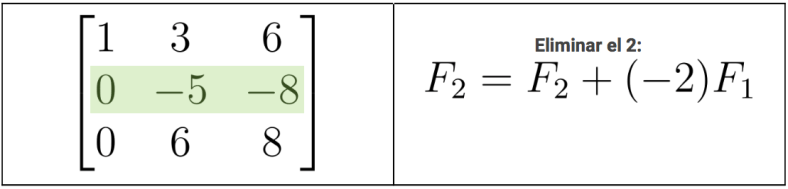
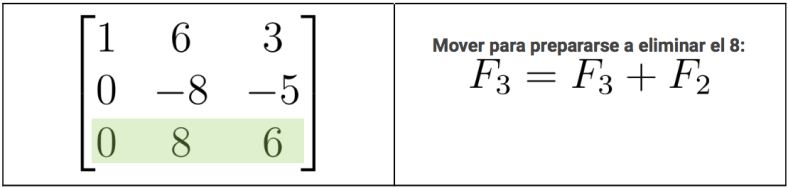
PIVOT:
Y finalmente, y ademas muy importante es que si hacemos una operación del estilo:

El Determinante NO cambia su valor, pero hay que dejar a una fila/columna fuera, sino volvemos a la propiedad de la dependencia lineal que nos da cero.
Separar en Combinación Lineal
Podemos elegir alguna fila o columna y hacer el siguiente proceso, dando como resultado que la determinante se conserva.
Pero no solo podemos hacer eso, sino que podemos hacer una combinación lineal de las filas o comunas, mira el siguiente ejemplo:

¿Cómo Calcular Determinantes Inmensos?
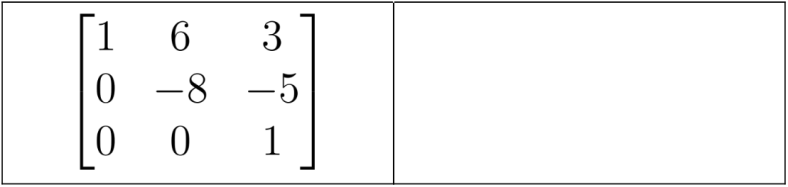
Paso 0: Aplica pseudo «Gauss – Jordan» a tu matriz inmensa.
Paso 1: Usando esta idea para calcular matrices diagonales o triangulares(Si también aplica a matrices triangulares) (la idea sale de hacer n SCALES, y PIVOT)


Determinantes y Vectores Canónicos
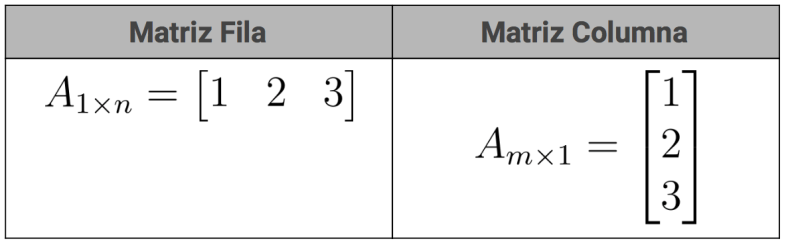
Un vector cántico de Rn es una matriz fila / columna de mx1 o 1xn donde todos sus elementos son ceros excepto uno que es el uno del campo.
*Considere que están en R3

Un vector canino tiene la siguiente forma:


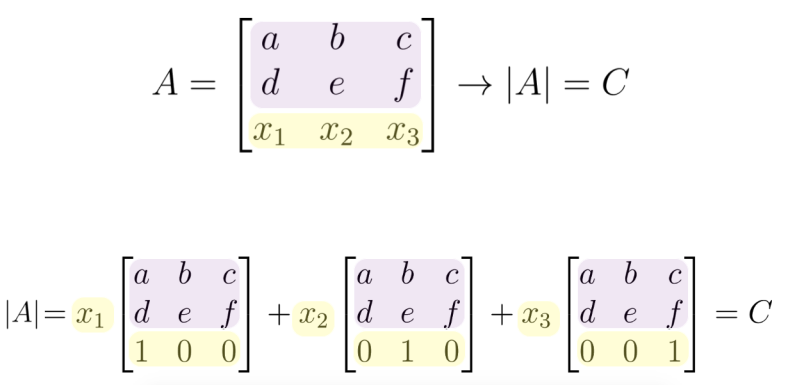
Recordando esto podemos usarlo para llegar a este pequeño tip:
El Determinante eliminando la fila o columna es igual:
Es decir, al hacer el cofactor de un vector canónico el resultado ES el determinante.
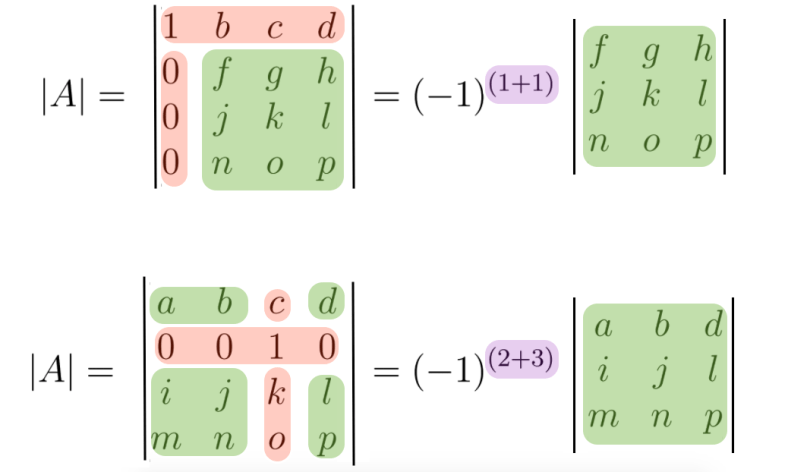
CoFactores
Esta idea la podemos generalizar de esta manera:

Oto elemento muy importante es el menor, que no es más que la Matriz en si del cofactor.

Matriz Adjunta
Es la Matriz de Cofactores transpuesta, así de sencillo, vayamos por pasos mostrando:
Primero Calculemos La Matriz de Cofactores:
Esta matriz es una matriz donde cada elemento es el cofactor de esa posición, veamos un ejemplo:

Tomemos una Matriz y su Determinante
Después hagamos cofactores:

Y esta Matriz (y su transpuesta se vería así):

Y finalmente si dividimos esta matriz entre su determinante, tenemos su inversa:

Teorema Fundamental de las Adjuntas
«La Matriz Original por su Adjunta es la Identidad por el Determinante de la Original»

Regla de Cramer
La regla de Cramer es otra forma que tenemos de encontrar la solución de un sistema lineal de ecuaciones, pero esta vez usando lo que ya sabemos de los determinantes:
Veamos como hacerlo:

Matriz Ampliada cualquiera

Determinantes Necesarias a calcular
Y así las respuestas son tan sencillas como:

Soluciones Pro : p
 |
 |
 |
|