Una matriz, como ya vimos antes puede ser aproximada desde dos puntos de vista:
- TODA la información de Transformada Lineal (Vista en la lección pasada)
Ven te daré un repaso:
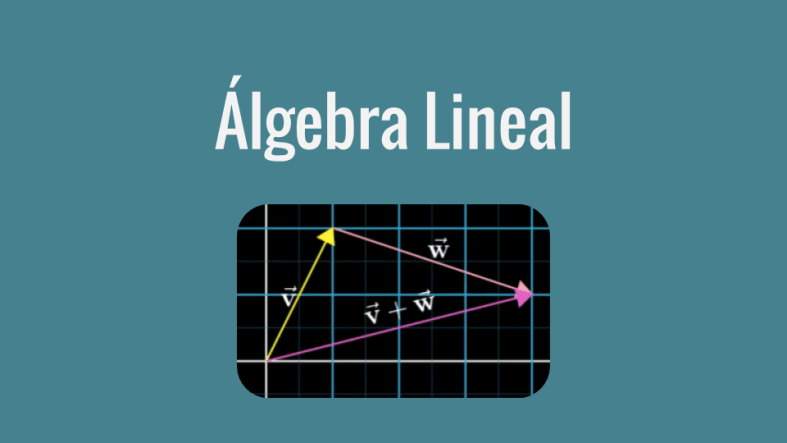
Transformaciones Lineales
Siendo muy general para cualquier transformada tenemos que:

Es decir, la formula completa de cualquier transformada lineal en dos dimensiones sería:

Y así tu colocas en la entrada cualquier vector y obtendrás la posición de ese vector tras la transformada lineal, y si te das cuenta, TODA la información de dicha transformación puede ser resumida en 4 números.
De hecho esto es tan importante que muchas veces los agrupamos juntos, y generamos lo que se conoce como una matriz:

Que no es más que juntar toda la información (osea las coordenadas de los vectores básico) tras una transformación lineal. Y con esto tenemos encapsulada TODA la información que existe sobre la transformación entre estos corchetes.
¿Quieres saber más?¿No me entendiste un comino? ¡Ve la Lección Pasada!
- Una tabla con valores
Y ya, no hay mucho mas interesante que contar de este forma de verlo.
De cualquier manera, lo importante ahora ya no es que son, sino como podemos jugar con ellas, veamos:
Simbología para una Matriz
Esto es una Matriz:
- Con Mayúscula se denota a la Matriz.
- Con minúscula se denota a cada elemento dentro de ella.

También podemos hablar de un elemento en especial de esta manera:
Tamaño
Una matriz de m filas por n columnas.

Dividirlas
Podemos dividirlas usando la idea de que podemos dividir a todas las matrices en 4 partes:


Si las dividimos de esta manera tenemos que nuestras nuevas 4 submatrices son:

En palabras esto quiere decir que:
- Primero vamos a hacer una partición que abarque desde a1,1 hasta am1,n1
- Después vamos a hacer una partición que abarque desde a1,n1 hasta am1,n2
- Después vamos a hacer una partición que abarque desde am1,1 hasta am2,n1
- Finalmente vamos a hacer una partición que abarque desde am1,n1 hasta am2,n2
Clasificación de Matrices

Rectangulares:
Cuadradas
Estas son las más interesante porque tienen una forma geométrica genial y es que cualquier matriz cuadrada encierra TODA la información de una transformación lineal de n dimensiones (Incluso si no me entendiste, tienes que admitir que suena cool)
Y podemos hablar mucho de las matrices cuadras, para empezar las dos diagonales:

Y gracias a estas diagonales podemos crear las matrices triángulos que son las que del otro lado de una matriz son todo ceros:

Y son las combinamos tenemos dos cosas muy importantes:

La Matriz Identidad
Esta es una matriz muy importante porque esta encapsula una transformación lineal en la que todo sigue igual, osea la transformación lineal más aburrida de todas.

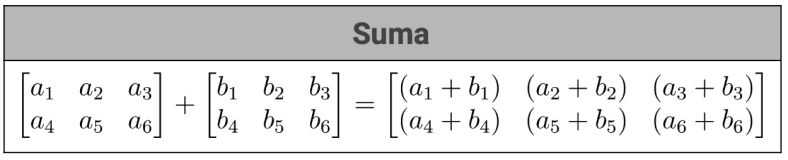
Operaciones
Recuerda que en las siguientes dos operación SOLO se pueden realizar si son matrices del mismo orden.

Multiplicación

Empecemos por lo MÁS MÁS BÁSICO

Para multiplicar 2 matrices tenemos que estar seguro de lo siguiente:
- La matriz A debe ser de m x n
- La matriz B debe ser de n x p
Y por lo tanto la matriz tendrá un orden m x p
Además hay que recordar que NO ES CONMUTATIVA ESTA OPERACIÓN.
Este GIF deberán explicarlo lo suficientemente bien.
¿Y que significa esa Operación?
Recuerda que en una matriz esta toda la información de una transformación lineal, así que si la multiplicación por un vector cualquiera obtener la posición de ese nuevo vector, con la formula que hicimos en la lección pasada:

La vieja confiable fórmula para matrices : ,)
Podemos entender una multiplicación de matrices simplemente como la «composición» de dos transformaciones lineales:

Es decir, en vez de aplicar primero una transformación y luego la otra (lo cual a la larga es mucho trabajo) mejor primero saca esa composición de matrices.
Y eso es lo que significa multiplicar matrices, es encontrar una composición, de ahí que no sea transitiva, no es lo mismo hacer primero una rotación y luego estirar el espacio, que hacerlo pero al revés.
Matriz Transpuesta
Una matriz transpuesta es una matriz igualita a A donde cada coordenada esta cambiada,mas bien esta girada, déjame me explico con dos elementos:



Simétrica
«Es una matriz cuya transpuesta es igual a si misma»
Para lograr verificar que es simétrica, hay que tener en cuenta estas ideas:
- Debe ser cuadrada
- Ignora la diagonal
- Comprueba una a una las demás


Antisimétrica
«Es una matriz cuya transpuesta es igual a si misma (por -1)»
Para lograr verificar que es simétrica, hay que tener en cuenta estas ideas:
- Debe ser cuadrada
- Ignora la diagonal
- Comprueba una a una las demás

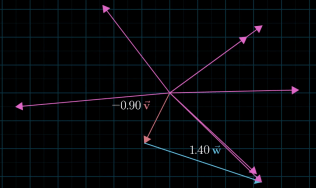
Dependencia Lineal
La dependencia lineal de una matriz es justo lo que vimos en la clase pasada (QUE DEBERIAS VER SI NO LA HAS VISTO ¡YA!)
Repaso 1:
Dependencia y Independencia
Sirve para describir que cierto vector, es más bien inútil. Pues si lo eliminamos nuestro rango o «sean» sigue siendo exactamente igual.

Es decir que podemos expresar a nuestro vector u como la combinación lineal de v y w.
Repaso 2:
Hay algo muy importante y también curioso que recordar y es que puede pasar que en nuestra transformación ambos vectores resultantes sean dependientes, en ese caso, tenemos que la transformación aprieta a todo el espacio 2D en una sola línea

Bueno, ahora si vamos con las matrices en si:
RECUERDA QUE COMO YA VIMOS LAS TRASPUESTAS LO QUE VOY A DECIR PARA LAS COLUMNAS TAMBIEN SIRVE PARA LAS FILAS. LA DEPENDENCIA LINEAL LA CONSERVA UNA TRASPUESTA.

Ahora lo único que deberíamos buscar es que podamos expresar un vector como la suma de los otros 2.

Rango
Es una operación que nos permite calcular el número de filas / columnas linealmente independientes.
Operaciones Elementales
Para lograr esto se usa lo que se conoce como operaciones elementales, las operaciones elementales son operaciones en las que NO se afecta el rango.
1.- Intercambio de Filas / Columnas

2.- Filas / Columnas por un escalar (n no debe ser 0)

3.- Suma Filas / Columnas y producto por otra

Podemos unir las 2 ultimas operaciones y así quedarnos con 2 operaciones:

Rango por Gauss
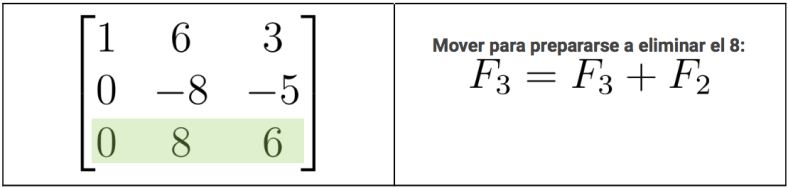
Para hacerlo, vamos a tener que realizando operaciones elementales llegar a una matriz triangular, como esta:

En resumen las operaciones que tenemos permitidos usar son:
- Permutar una fila/columna
- Multiplicar una fila/columna por un escalar
- Sumarle a una fila/columna otra fila/columna multiplicada por un escalar
- Eliminar filas proporcionales o nulas
Cuando lleguemos a nuestra matriz triangular nuestro rango será el numero de filas/columnas que no sean nulas.
Veamos un ejemplo:

Recuerda que tenemos que hacer todos los circulitos a que valgan a cero.
Así que empecemos:

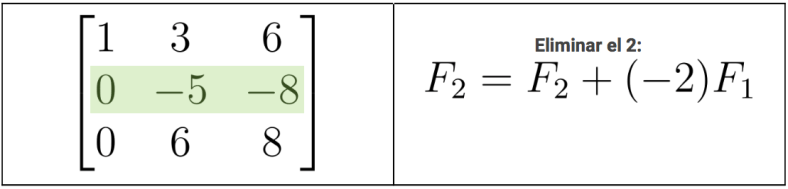

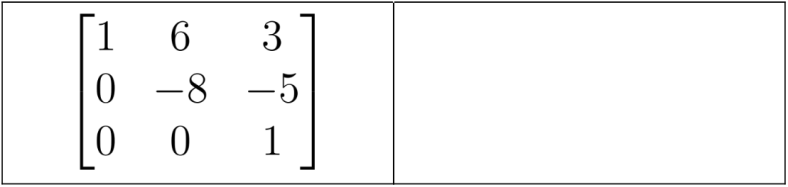
Y ya, como viste así podemos llegar y concluir que el rango es el número de columnas/filas que NO sean nulos.
Matrices Inversas

Recuerda otra vez que una matriz no es más que la información de una transformación lineal, así que podemos pensar en una características más de estas.
¿Existe una transformación que revierta lo que acabo de hacer?
Si claro que existe y se llama obviamente la transformación inversa, así si tenemos una matriz, tenemos una matriz inversa.
¿Cómo demonios las calculo?
Algo genial del método de gauss es que nos da una forma muy fácil de calcularla, tenemos que seguir los siguiente pasos:
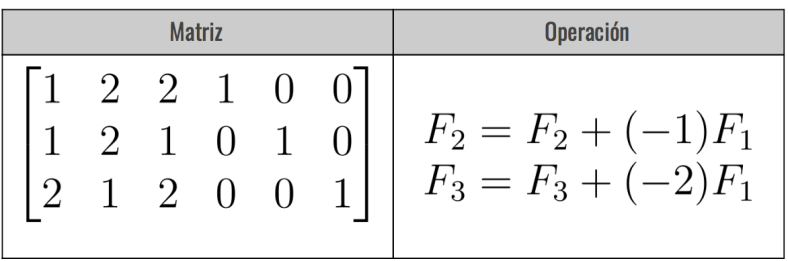
Paso 1: Dibujar nuestra zona de batalla.
Esta cosa se llama «matrices ampliadas», de un lado tenemos a nuestra matriz y del otro a la matriz identidad.

Paso 2: Transformar a la Matriz X en nuestra Matriz Identidad, usando las operaciones elementales y en general el Método de Gauss, veamos un ejemplo:




Inversa y el Determinante
Si una matriz es invertible, es decir tiene inversa entonces su determinante es diferente de cero. Y a la inversa, si s determinante es diferente de cero entonces tiene que tener una inversa.
…Tienen que admitir esa relación es simplemente genial.
La Inversa y la solución de Ecuaciones
Teoremas:
- Si una matriz es invertible, siempre el sistema homogéneo de esa matriz tiene una única solución, y también en el sentido opuesto, basta con encontrar que tiene solución única para saber que es invertible.
- Si una matriz es invertible o tiene un sistema homogéneo con solución única, podemos decir que el sistema tiene solución para cualquier vector en el campo.
Podemos usar la inversa también para encontrar las soluciones:

Podemos decir entonces que la solución de cualquier matriz (siempre que tenga inversa) es:

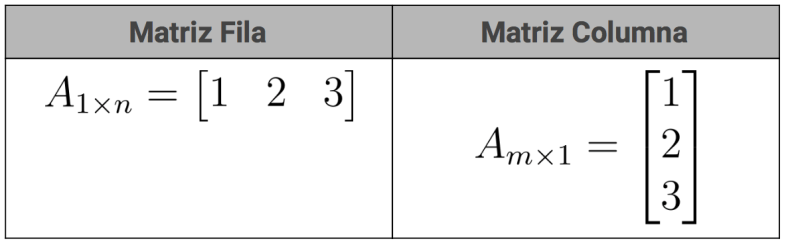
Vectores Canónicos
Un vector cántico de Rn es una matriz fila / columna de mx1 o 1xn donde todos sus elementos son ceros excepto uno que es el uno del campo.
*Considere que están en R3

Un vector canino tiene la siguiente forma:


Código que hace Todo Esto

 |
 |
 |
|