Una memoria es un medio de almacenamiento de información permanente o semipermanente, la información almacenada posteriormente será recuperada. Existen numerosos tipos de memorias.
Tipos
- Memorias Ópticas: La información se recupera utilizando la reflexión de la luz sobre la superficie del medio. En el caso de un CD o DVD, la lectura se realiza iluminando con un láser y midiendo la reflexión.
- Memorias Magnéticas: Se utilizan patrones de magnetización sobre una superficie cubierta de un material magnetizable. Algunos de estos tipos de memorias como son: disco duro, disquete, cinta magnética, etc.
- Memorias de Semiconductor: Es un circuito integrado o chip capaz de almacenar un número binario y recordarlo cuando éste sea direccionado o seleccionado por la Unidad Central de Proceso o CPU, o cualquier otro dispositivo digital. Existen dos principales tipos de memoria; RAM y ROM.
RAM
La memoria de acceso aleatorio (en inglés: random-access memory),se utiliza como memoria de trabajo para el sistema operativo, los programas y la mayoría del software. Es allí donde se cargan todas las instrucciones que ejecutan el procesador y otras unidades de cómputo. Se denominan «de acceso aleatorio» porque se puede leer o escribir en una posición de memoria con un tiempo de espera igual para cualquier posición, no siendo necesario seguir un orden para acceder a la información de la manera más rápida posible.
Hay dos tipos básicos de memoria RAM
- RAM dinámica (DRAM)
- RAM estática (SRAM)
Los dos tipos de memoria RAM se diferencian en la tecnología que utilizan para guardar los datos, la memoria RAM dinámica es la más común.
Memoria DRAM
(Dynamic Random Access Memory) es un tipo de memoria dinámica de acceso aleatorio que se usa principalmente en los módulos de memoria RAM y en otros dispositivos, como memoria principal del sistema. Se denomina dinámica, ya que para mantener almacenado un dato, se requiere revisar el mismo y recargarlo, cada cierto período, en un ciclo de refresco. Su principal ventaja es la posibilidad de construir memorias con una gran densidad de posiciones y que todavía funcionen a una velocidad alta: en la actualidad se fabrican integrados con millones de posiciones y velocidades de acceso medidos en millones de bit por segundo. Es una memoria volátil, es decir cuando no hay alimentación eléctrica, la memoria no guarda la información. Inventada a finales de los sesenta, es una de las memorias más usadas en la actualidad.
Memoria SRAM
Static Random Access Memory (SRAM), o Memoria Estática de Acceso Aleatorio es un tipo de memoria basada en semiconductores que a diferencia de la memoria DRAM, es capaz de mantener los datos, mientras esté alimentada, sin necesidad de circuito de refresco. Sin embargo, sí son memorias volátiles, es decir que pierden la información si se les interrumpe la alimentación eléctrica.
La memoria RAM dinámica necesita actualizarse miles de veces por segundo, mientras que la memoria RAM estática no necesita actualizarse, por lo que es más rápida, aunque también más cara. Ambos tipos de memoria RAM son volátiles, es decir, que pierden su contenido cuando se apaga el equipo.
ROM
La memoria de solo lectura, conocida también como ROM (acrónimo en inglés de read-only memory), es un medio de almacenamiento utilizado en ordenadores y dispositivos electrónicos, que permite solo la lectura de la información y no su escritura, independientemente de la presencia o no de una fuente de energía.
Los datos almacenados en la ROM no se pueden modificar, o al menos no de manera rápida o fácil. Se utiliza principalmente para contener el firmware (programa que está estrechamente ligado a hardware específico, y es poco probable que requiera actualizaciones frecuentes) u otro contenido vital para el funcionamiento del dispositivo, como los programas que ponen en marcha el ordenador y realizan los diagnósticos.
Glosario
Bit
Binary digit es una expresión inglesa que significa “dígito binario” y que da lugar al término bit, su acrónimo en nuestra lengua. El concepto se utiliza para nombrar a una unidad de medida de información que equivale a la selección entre dos alternativas que tienen el mismo grado de probabilidad. El bit, en otras palabras, es un dígito que forma parte del sistema binario. El bit es la unidad más pequeña de información. Permite representar dos valores diferentes (como abierto/cerrado o verdadero/falso) y asignar dichos valores al estado de encendido (1) o apagado (0).
Byte
El conjunto de ocho bits que forman una unidad de información recibe el nombre de octeto. Un byte, por otra parte, es una seguidilla de bites aledaños cuyo tamaño está vinculado al código de información en que esté definido. Es habitual, de todas formas, que un byte está compuesto por 8 bites.
Celda Binaria
La celda binaria es el bloque básico de construcción de una unidad de memoria, es capaz de almacenar un bit de información, esta información que recibe, almacena y transmite puede ser un 1 o un 0; el cual será utilizado para formar un conjunto más grande de información y tiene 2 salidas una para el valor normal y otra para el valor complementado del bit almacenado en él.
Palabra de Memoria
Una palabra es una cadena finita de bits que son manejados como un conjunto por la máquina. El tamaño o longitud de una palabra hace referencia al número de bits contenidos en ella, y es un aspecto muy importante al momento de diseñar una arquitectura de ordenadores. El tamaño de una palabra se refleja en muchos aspectos de la estructura y las operaciones de las computadoras. La mayoría de los registros en un ordenador normalmente tienen el tamaño de la palabra. El valor numérico típico manipulado por un ordenador es probablemente el tamaño de palabra. La cantidad de datos transferidos entre la CPU del ordenador y el sistema de memoria a menudo es más de una palabra. Una dirección utilizada para designar una localización de memoria a menudo ocupa una palabra. Los ordenadores modernos normalmente tienen un tamaño de palabra de 16, 32 ó 64 bits.
Se puede acomodar como:
- Bit – 1
- Nibble – 4
- Byte – 8
- Word – 16
- Double Word – 32
- Double Double Word – 64
Muchos otros tamaños se han utilizado en el pasado, como 8, 9, 12, 18, 24, 36, 39, 40, 48 y 60 bits. El slab es uno de los ejemplos de uno de los primeros tamaños de palabra. Algunos de los primeros ordenadores eran decimales en vez de binarios, típicamente teniendo un tamaño de palabra de 10 ó 12 dígitos decimales.
Dirección de Memoria
En informática, una dirección de memoria es un identificador para una localización de memoria con la cual un programa informático o un dispositivo de hardware pueden almacenar un dato para su posterior reutilización. Una forma común de describir la memoria principal de una computadora es como una colección de celdas que almacenan datos e instrucciones. Cada celda está identificada por un número o dirección de memoria.
Densidad de Memoria
La densidad superficial es una medida sobre la cantidad de bits de información que se puede almacenar en una longitud dada de la pista , área de la superficie , o en un volumen dado de un medio de almacenamiento informático . En general, una mayor densidad es más deseable , ya que permite un mayor volumen de datos que se almacenan en el mismo espacio físico . Por lo tanto, la densidad tiene una relación directa con la capacidad de almacenamiento de un medio dado. La densidad también, en general tiene un efecto bastante directo sobre el rendimiento así como el precio.
Latencia
Se denominan latencias de una memoria RAM a los diferentes retardos producidos en el acceso a los distintos componentes de esta última. Estos retardos influyen en el tiempo de acceso de la memoria por parte de la CPU, el cual se mide en nanosegundos (10 -9 s) Resulta de particular interés en el mundo del overclocking el poder ajustar estos valores de manera de obtener el menor tiempo de acceso posible.
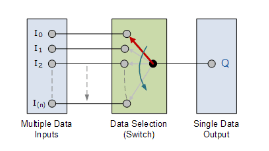
Bus de Datos
Un bus de datos es un dispositivo mediante el cual al interior de una computadora se transportan datos e información relevante. El bus es una serie de cables que funcionan cargando datos en la memoria para transportarlos a la Unidad Central de Procesamiento o CPU. En otras palabras, un bus de datos es una autopista o canal de transmisión de información dentro de la computadora que comunica a los componentes de dicho sistema con el microprocesador. El bus funciona ordenando la información que es transmitida desde distintas unidades y periféricos a la unidad central, haciendo las veces de semáforo o regulador de prioridades y operaciones a ejecutar.
Bus de Direcciones y Control
El bus de direcciones es un canal del microprocesador totalmente independiente del bus de datos donde se establece la dirección de memoria del dato en tránsito. El bus de dirección consiste en el conjunto de líneas eléctricas necesarias para establecer una dirección. La capacidad de la memoria que se puede direccionar depende de la cantidad de bits que conforman el bus de direcciones, siendo 2 n el tamaño máximo en bits del banco de memoria que se podrá direccionar con n líneas. Un bus de control, es parte del bus de la computadora (la conexión física), que es utilizado por la CPU para comunicarse con otros dispositivos. El bus de control transmite comandos desde la CPU y devuelve una señal de estado desde el dispositivo.