Página 9 de 15
Funciones
«Cuando asignamos un valor a X la variable Y adquiere un único valor, se dice que tal relación es una función».

En donde:
- Y dependiente
- X independiente
- Y es función de X
- Y depende de X
- Y es el nombre de la variable
Dominio de la Función

Conjunto de valores que adquiere la variable independiente (X), para los cuales la dependiente (Y) es un número real.
Por lo tanto que una función esté definida en los Reales significa que al asignar un valor a X la variable dependiente (Y) no debe presentar ninguna de las siguientes.
Indeterminación
- 0/0
- K/0
- Infinito
- Raíz negativa
Intervalo
Contradominio, Rango y Recorrido, Imagen
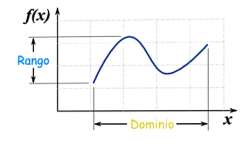
Es el conjunto de valores que adquiere la función.
Es muy fácil poder despejar la variable Y y calcular su dominio.
Valuar una Función
Para el estudio de una función es necesario conocer qué valor toma la función para un determinado valores de X ya sea # o literal.
Funciones Explícitas
En las funciones explícitas se pueden obtener las imágenes de x por simple sustitución.
![]()
Funciones Implícitas
En las funciones implícitas no se pueden obtener las imágenes de x por simple sustitución, sino que es preciso efectuar operaciones.
![]()
Operaciones
El dominio de estas operaciones es la intersección del dominio de f(x) y g(x)
Excepto en el cociente donde es la intersección de ambos y donde g(x) ≠0


Prueba de la Línea Vertical

Una curva en el plano xy es la gráfica de una función de x si y sólo si ninguna línea vertical se interseca con la curva más de una vez.
Funciones Famosas







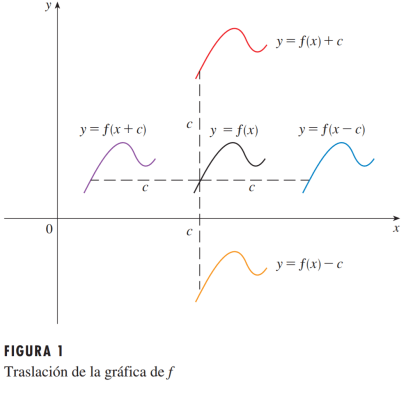
Traslación de Funciones



Translación
Alargamiento y Reflexión

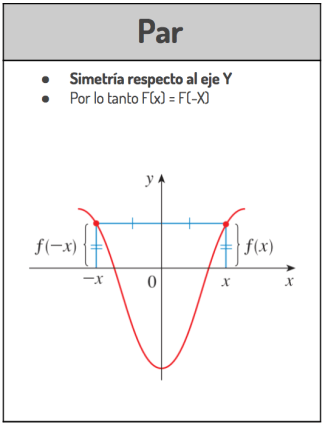
Simetría

Funciones Trascendental
En las funciones trascendentes la variable independiente figura como exponente, o como índice de la raíz, o se halla afectada del signo logaritmo o de cualquiera de los signos que emplea la trigonometría.
Exponenciales
- Los puntos (0,1) y (1,a) siempre existen
- Crece si a > 1
- Decrece si a < 1


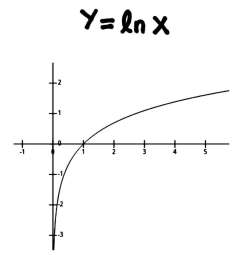
Logarítmicas
La función logarítmica en base a es la función inversa de la exponencial en base a.
![]()

Trigonométricas
La funciones trigonométricas asocian a cada número real, x, el valor de la razón trigonométrica del ángulo cuya medida en radianes es x.
![]()
Función Recíproca
La función recíproca o inversa de f , son como:
![]()
![]()

Para obtener la ecuación hay que despejar a la variable x
Función Inversa

La función recíproca o inversa de es otra función son como:
![]()
![]()
Funciones Racionales

Dominio: Son todos los reales menos cuando g(x) = 0
Raíces: Son cuando h(x)=0
Asíntotas



Introducción a Calculo
AL: Extra 2
Resolver usando Gauss-Jordan
Espacios Vectoriales


Dale Click
Hay una pregunta muy común que se suelen hacer a los que estudiamos estas materias:
¿Qué es un vector?
- Es una flecha en el espacio que casualmente tiene una bonita forma matemática.
- Es un conjunto de números que casualmente tienen una bonita visualización gráfica.
- Es algo más…



…. Para que me entiendas, usaremos algo que no es un vector para mucha gente pero tiene varias características interesantes:
Funciones

Las puedes sumas COMO A LOS VECTORES

Y MULTIPLICAR

INCLUSO PUEDES TENER TRANSFORMACIONES LINEALES
Es más incluso puedes expresar a una derivada como una matriz:

…
Así que a la pregunta:
¿Qué es un vector?
La mejor respuesta que tengo es: Cualquier objeto matemático en el que exista la noción de añadir estos objetos e multiplicarlos por un escalar.
Eso es un vector.
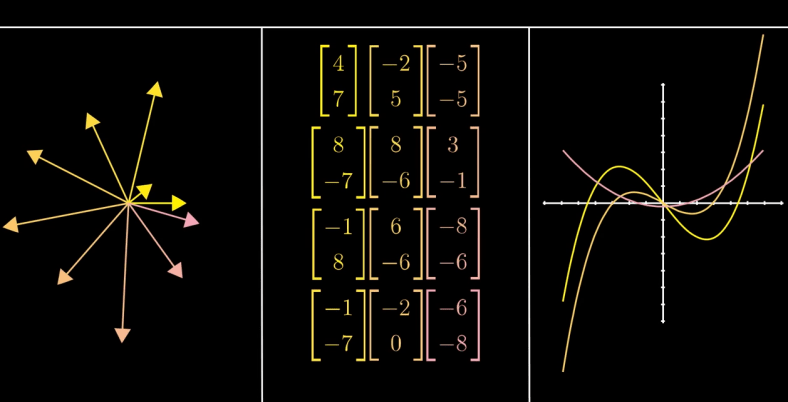
Esto son vectores
Campo
Definición Formal: Un campo K es un conjunto (no vacío) con dos operaciones cerradas, suma y producto, tales que para cualquier 3 elementos se cumplen las siguientes propiedades:

Leyes
Campos Conocidos

Tal vez me recuerdes en campos como:
Algunos campos que quizá conozcas:
- Racionales
- Reales
- Complejos
- Cualquier aritmética modular cuya n sea prima
Algunos conjuntos que «parecen» ser campos pero no lo son son:
- Los enteros
- Naturales
Propiedades Básicas de un Campo
- Los neutros son únicos
- Los inversos son únicos
- Si x+z=y+z, entonces x=y
- Si xz=yz y z no es 0 entonces
- Cualquier elemento por el cero del campo, es si mismo.
- El inverso aditivo de un inverso aditivo de un elemento es ese elemento.
- Si XY= 0, o X o Y es cero.
- El inverso multiplicativo de un inverso multiplicativo de un elemento es ese elemento.
Podemos definir que un Espacio Vectorial tiene que cumplir las siguientes características:

Espacio Vectorial
Es más podemos definir un Espacio Vectorial sobre un Campo K cualquiera, como un conjunto no vacío en el que existe algo parecido a sumar, (una operación que recibe dos vectores y te regresa un vector) y multiplicar por un escalar (es decir una operación tal que recibe un vector y un escalar y regresa un vector).
Espacio Vectorial: Cualquier conjunto que obedezca estas normas.
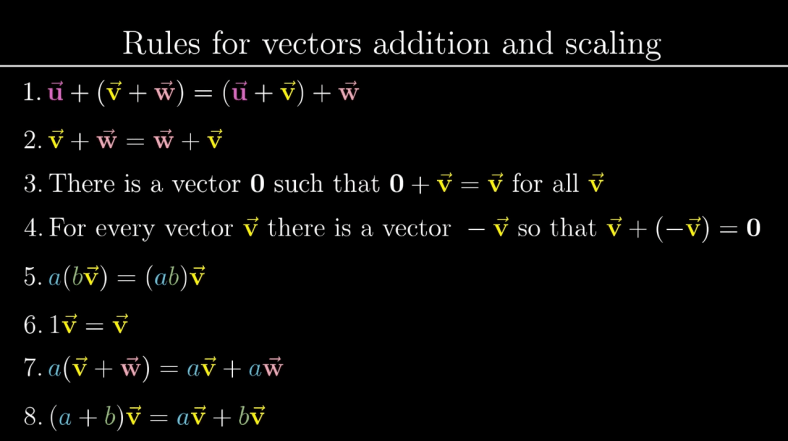
Cortesía de 3Blue1Brown
SubEspacio Vectorial
«Es un subconjunto de un espacio vectorial en la que la suma y el producto por escalares de sus elementos siempre pertenezcan a ese mismo subconjunto»
Que W sea un subespecie vectorial de V quiere decir que W es un espacio vectorial con respecto a K con las operaciones restringidas a W.
Si W no es el conjunto vacío podemos decir que:
- La suma de cualesquiera dos elementos de W esta en W.
- La multiplicación de un escalar con cualquier elemento de W continua estando en W.
O simplificando todo en una ecuación:

Así entonces para probar que algo es un subespacio vectorial hay que bien o probar que la suma y el producto por escalares se mantiene en W o probar la proposición de arriba, como tu quieras.
Propiedades de los SubEspacios
- El subconjunto en el que solo esta el cero vector siempre será un subespacio.
- V es subespacio vectorial de si mismo.
- La intersección de dos subespacios vectoriales es un subespacio.
- El conjunto de todos los elementos de la suma de 2 subespacios vectoriales es un subespacio vectorial.
SubEspacios Generados
Un subespacio o espacio generado de un montón de vectores es el espacio vectorial mas pequeño que contiene a todos esos vectores.
O también se puede ver como el conjunto de todas las combinaciones lineales que se puede hacer con estos vectores.
Forma 1

Forma 2
Otra definición de este concepto se puede tener con estas dos ideas:
Con estas condiciones aseguras que subespacio que estas creando es el mas pequeño posible.
Propiedades:
- El Subespacio generado es único
- El Subespacio del vacío es el cero vector
- El Subespacio del Subespacio es el primer Subespacio.
- Si cierto subespacio generado genera al espacio vectorial original, lo seguirá haciendo si le añades cualquier otro vector.
Ejemplos:

Encontrar si son Linealmente Independientes o no
Antes que nada, si, se que no, no encontré ninguna otro titulo que fuera lo suficientemente corto para expresarlo de otra manera.
Aquí la idea es general: Dado un Conjunto de Vectores ¿Son Linealmente Independientes esos vectores, o de otra forma, son Dependientes?
Para encontrar la respuesta solo hay un camino:
Ver si que exista una combinación lineal que de el vector cero implica (osea obliga a que pase) a que tus escalares sean cero.
Graficamente podemos verlo como:

Dame ese sistema

Dime ¿Esta es la única solución?
Tips:
- Dado un sistema de ecuaciones homogéneo si tiene mas incógnitas que ecuaciones el sistema tiene muchas soluciones y por lo tanto el sistema asociado es dependiente.
- Si su determinante es diferente de cero entonces solo tiene la solución trivial y por lo tanto son independiente el sistema asociado.
Propiedades Independencia Lineal:
- Si cierto conjunto de Vectores son Linealmente Independientes, entonces no importa si le quitas un vector al conjunto, seguirá siendo Linealmente Independientes
- Si cierto conjunto de Vector es contienen al cero vector es imposible que sean linealmente independientes.
Base de un Espacio Vectorial
Sea un Espacio Vectorial V, entonces podemos tener un conjunto de vectores de esa V que llamamos Base.
Podemos decir que un Conjunto de Vectores de V es base si y solo si:
- Generan a V
- Son Linealmente Independientes
U otra definición bonita sería:
«Con el Conjunto de Vector Base es el mínimo conjunto en Cardinalidad con el que es posible escribir cualquier vector de V»

Propiedades:
- Todas las bases tiene un la misma cardinalidad, digo, esto es obvio porque la dimensión esta bien definida, es decir es única.
Ejemplos:
Por ejemplo podemos saber que con este conjunto de vectores en R2, podemos crear cualquier vector en 2D

Los Clásicos «i» y «j»

Pero no son únicos, mira :0
Dimensión:
Podemos decir que la dimensión de V es la cantidad mínima de vectores que tendrá una Base que genera a V, osea, que la dimensión es la cantidad de vectores canónicos.
Teoremas Muy Importante:
Sea:

Los siguientes enunciados son equivalentes:
- A es invertible
- F1, F2, F3 … Fn generan a K^n
- C1, C2, C3 … Fn generan a K^n
- F1, F2, F3 … Fn son linealmente independientes
- C1, C2, C3 … Fn son linealmente independientes
- B = {F1, F2, …, Fn} son base de K^n
- B = {C1, C2, …, Cn} son base de K^n
Sea n=dim V
Entonces los siguientes enunciados son equivalentes:
- v1, v2, … vn generan a V
- v1, v2, …vn son linealmente independientes
- B = {v1, v2, v3, … vn} es una base de V
Depurando para llegar a una Base
Supongamos que tenemos un conjunto de vectores con el que podemos generar un Espacio Vectorial, pero la cantidad de vectores en ese conjunto es mayor de la dimensión del Espacio Vectorial, es decir que hay «vectores de sobra».
Para podemos depurar aplicamos el siguiente algoritmo:
- Si es que la cardinalidad el conjunto es mayor a la dimensión de V
- Encontrar el Vector que es Combinación Lineal
- Eliminarlo
- Repite a 1
Podemos aplicar Gauss Jordan también, con esto, lo que podemos hacer es:
Generar la matriz que se forma de intentar encontrar el cero vector con todos ellos.
Sistemas d
Producto Punto y Producto Cruz
Representación Canonica de Jordan

Sistema de Ecuaciones – Gauss Jordan
Este articulo esta basado en este documento, si quieren ponerse técnicos, tomen palomitas disfruten de muchos, MUCHOS tecnicismos:
Denme click para verlo
Podemos usar las matrices y álgebra lineal para encontrar las soluciones de un sistema de ecuaciones lineales dentro de cualquier campo (eso quiere decir que podemos ocuparla incluso para resolver sistemas en el campo de los complejos o el campo de los números modulo n)
¿Mi sistema se puede resolver? (Prerequsisitos)
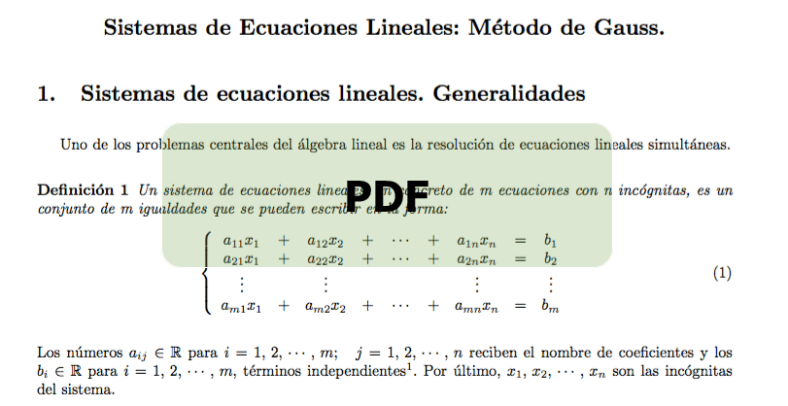
Este es muy obvio pero mejor lo digo, TODAS las ecuaciones debe ser lineales, es decir estar escritas de la forma:

Sistema de Ecuaciones
Matriz Ampliada
Llamamos a lo que acabo de dibujar una «matriz ampliada» y la podemos notar en dos partes:

Tipos de Soluciones
Recordemos antes que nada sobre estas ecuaciones, cada una de ellas representa algo en el espacio y podemos «solucionarlas» al dibujarlas en el espacio:
Y podemos separar nuestras soluciones en 3 amplias zonas:
Sistemas Consistentes

Podemos tener primeramente sistemas consistentes, es decir que tienen mínimo una solución.
Es decir que las 3 rectas se interesectan MÍNIMO en un punto.
Además algo muy interesante es que todo sistema homogéneo, osea que sus coeficientes independientes valgan cero es consistente. Donde la solución mas obvia es que A, B y C valgan CERO.

Así tenemos dos opciones:
- Tocan en un punto: Que es lo «normal» y lo esperado
- Son paralelas.
Este caso es muy especial , pues nos dice que el sistema esta dado por ecuaciones que son múltiplos de la otra o otra forma de verlo es que esta dado por vectores linealmente dependientes, así que de forma numérica cuando tengamos este caso llegamos a algo que siempre es verdad, a una tautología. Te muestro como se ve:

Estos sistemas dan cosas raras…
Es decir, ese sistema tiene infinitas soluciones.
Para saber si un sistema es dependiente, por ejemplo si hablamos en dos dimensiones basta con ver que una tiene que ser múltiplo de la otra.
Sistemas No Consistentes

Estos son los feos.
Ocurren cuando llegamos una contradicción, como este estilo:

Operaciones Elementales
Para lograr solucionar el sistema se usa lo que se conoce como operaciones elementales, las operaciones elementales son operaciones en las que NO se afectan la solución de la Matriz.
1.- SWAP: Intercambio de Filas / Columnas

Podemos si queremos (aunque no se en que momento quisiéramos) expresar esta operación como una «matriz elemental»
Donde es casi la identidad, pero solo hacemos el swap entre las filas deseadas.

2.-SCALE: Filas / Columnas por un escalar (n no debe ser 0)

Podemos si queremos (aunque no se en que momento quisiéramos) expresar esta operación como una «matriz elemental»
Donde es casi la identidad, pero es k veces la identidad en la fila deseada.

3.- PIVOT: Suma Filas / Columnas y producto por otra

Y a esta también la podemos poder como una matriz elemental, esta es igual que la identidad, pero en la coordenada Y,X (NO x,y) esta el numero que queremos.

Podemos unir las 2 ultimas operaciones y así quedarnos con 2 operaciones:

Swap y Pivot
Eliminación Gaussiana
Objetivo: Pasar de una Matriz «normal» a la forma «Escalonada por Filas»

Para ser Escalonada por Filas
Estas no tienen porque ser matrices cuadradas, pero tienen que cumplir con las siguientes características:
- Para toda fila, si existe un elemento distinto de cero (pivote), entonces para todos los elementos anteriores de la fila deben ser cero y este elemento (pivote) debe ser uno.
- Los pivotes deben aparecer de forma escalonada.
- Si una fila no tiene pivotes entonces toda esa fila debe ser nula.
- Si una fila no tiene pivotes (osea que sea nula) entonces todas las de abajo no pueden tener pivotes.

Estas NO lo son

Estas sí que lo son
¿Y cómo hago eso? Usando Pivotes.
Pivote: Son los óvalos, se llaman pivotes porque nos vamos a sujetar de ellos y vamos a buscar hacerlos uno y a todo lo demás de esa fila/columna debe buscar hacerse cero.
La Definición Formal: Un pivote es primer elemento de una fila distinto de cero y si o si tiene que ser un uno.
Algoritmo:

Resumen
- Inicias en el primer elemento.
- Convierte ese elemento a uno (usando la operación escalar)
- Usas ese uno que acabas de crear (usando la operación pivot) para hacer a toda a parte de abajo de la columna sea cero.
- Te mueves a la siguiente columna y bajas un elemento el columna y repites desde el paso uno.
Código
Soy un estudiante de sistemas computacionales, así que la manera más fácil para mi de entender algo es viendo código, así que te muestro.

Gauss Jordan
Objetivo
Nuestro objetivo es usando las operaciones elementales encontrar una forma de pasar nuestro matriz ampliada a esta forma:

Esta es la Matriz (ampliada) a la que queremos llegar

Que representa esto
De una manera más formal es llevar a nuestra matriz a una matriz escalonada reducida:
Decimos que una matriz esta de esta manera cuando ademas de lo arriba, para cualquier pivote toda esa columna (sin contarlo a el mismo) es nulo.

Estos si son matrices escalonadas reducidas
Algoritmo en si:
- Nos ubicamos en una fila y vemos un elemento
- Si ese elemento cero:
- Entonces encárgate de buscar en los elementos de abajo de esa columna el primer elemento que no sea cero, y cambia la fila y ve al paso 3.1.
- Si no encuentras colócate en la siguiente columna de la misma fila en la que estabas y regresa al paso 1.
- Si no es cero, tenemos nuestro pivote:
- Dividir toda la fila entre ese numero para que el elemento sea uno.
- Hay que encargarnos de hacer toda esa columna (menos ese elemento) sea cero.
- Una vez que acabes, colócate en la siguiente fila, en el lugar de la columna en la que estabas mas uno y regresa al paso 1
Código
Soy un estudiante de sistemas computacionales, así que la manera más fácil para mi de entender algo es viendo código, así que te muestro.

Tipos de Sistemas
Hay también otra característica de la que ya hemos hablado antes, la dependencia e independencia lineal, un tema bastante difícil, pero también muy importante, y es que las ecuaciones también pueden serlo, veamos:
Sistemas Independientes
Son aquellos que NO contienen ecuaciones dependientes. Y por lo tanto tiene máximo una solución.


Sistemas Dependientes
Son aquellos que SI contienen (incluso si no son todas) ecuaciones dependientes.
Bajo esta clasificación existen muchos ejemplo erróneos, así que apoyando de imágenes de la Fundación WhyU podemos llegar a ver sus características:
- Un sistema Dependiente de 2 ecuaciones es fácil de ver, ya que ambas tiene que ser o bien la misma o múltiplos de la misma:


- Un sistema Dependiente de más de 2 ecuaciones no tiene porque ser múltiplo para ser dependiente, mas bien hay que buscar que una sea una combinación lineal de las otras (o de algunas otras):

- Un sistema Dependiente NO tiene porque tener soluciones infinitas:

- Un sistema Dependiente PUEDE no tener solución:

Podemos usar Gauss Jordan para saber si un sistema es dependiente.


Ejemplos:
Los mejores ejemplos de estos temas los he encontrado viendo esta serie, de verdad, si saben ingles, vean este video, no se van a arrepentir.

Da click, no te vas a arrepentir

Determinantes
NOTA: ESTO SOLO SIRVE PARA MATRICES CUADRADAS
Hola, considero muy muy importante que hay hayas entendido como funcionan las matrices gracias a las entradas anteriores porque esto se va a poner bueno :3
El determinante es una herramienta que usamos para entender una propiedad rápida de una transformación lineal: ¿Qué tanto expando o comprime el espacio?
Si lo único que me importará fuera saber si es que mi espacio acaba de «crecer» o «reducirse» usamos los determinantes:
De forma formal (jajaja) podemos definir el determinante como:
«La razón de cambio entre el área de cierto objeto antes y después de la transformación lineal»
Osea, la determinante se puede entender mejor con la pregunta ¿Qué área tendrá un cuadrado de 1×1 tras la transformación lineal?
Por ejemplo el determinante de esta transformación es 6:
Y por más sorprendente que parezca el área en esta transformación no se afecta, es decir el determinante es uno.
Determinante = 0
Así que el determinante valga cero dice que se a ELIMINADO UNA DIMENSION, ES DECIR QUE TIENE AREA = 0 EN 2D, O VOLUMEN = 0 EN 3D.
¿Determinante Negativa?
Simplemente dice que la transformación «giro» el plano, eso es todo.
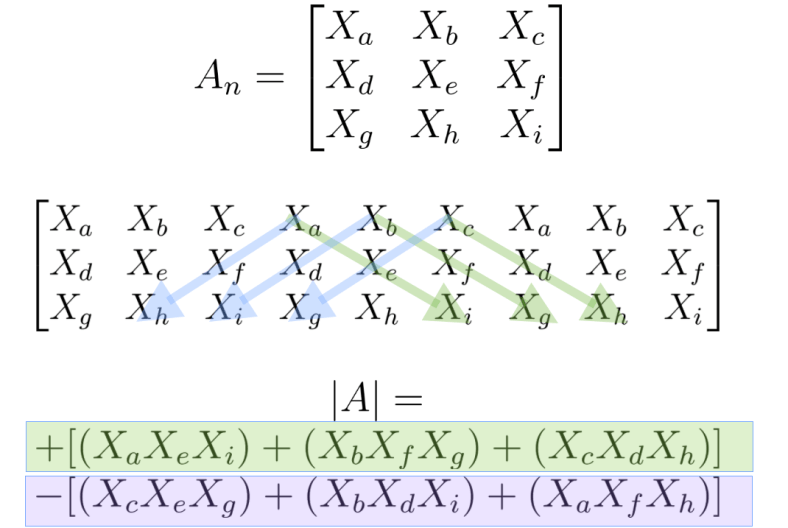
¿Cómo encuentro el Determinante?
En 2D


En 3D


Propiedades de los Determinantes
Es muy útil saber sacar el determinante, pero no lo es todo, veamos algunas propiedades:
La Determinante de la Transpuesta es igual que la Original

Transpuestas
Podemos sacar cosas de los Determinantes

Separar de una multiplicación

Sacar un Factor

Separar una suma
¿Esta determinante valdrá Cero?
Si dos filas/columnas son proporcionales significa que el determinante valdrá cero:

Si es que existe UNA fila/columna que es combinación lineal de TODAS las demás:

Si existe una fila/columna que sea nula:

Operaciones Elementales en Matrices
SWAP:
Si intercambio una fila/columna el determinante cambia de signo, pero el valor sigue igual:

Corolario: Si haces un SWAP en la matriz identidad su determinante siempre es -1.
SCALE:
Si escalas una fila o columna el determinante se escala por esa misma cantidad

Ejemplo:

PIVOT:
Y finalmente, y ademas muy importante es que si hacemos una operación del estilo:

El Determinante NO cambia su valor, pero hay que dejar a una fila/columna fuera, sino volvemos a la propiedad de la dependencia lineal que nos da cero.
Separar en Combinación Lineal
Podemos elegir alguna fila o columna y hacer el siguiente proceso, dando como resultado que la determinante se conserva.
Pero no solo podemos hacer eso, sino que podemos hacer una combinación lineal de las filas o comunas, mira el siguiente ejemplo:

¿Cómo Calcular Determinantes Inmensos?
Paso 0: Aplica pseudo «Gauss – Jordan» a tu matriz inmensa.
Paso 1: Usando esta idea para calcular matrices diagonales o triangulares(Si también aplica a matrices triangulares) (la idea sale de hacer n SCALES, y PIVOT)


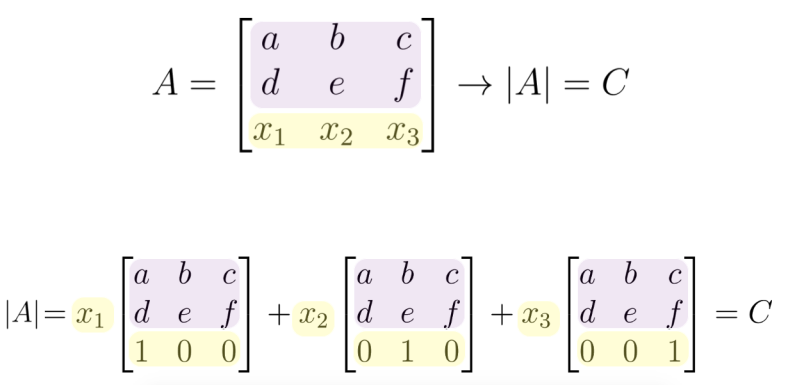
Determinantes y Vectores Canónicos
Un vector cántico de Rn es una matriz fila / columna de mx1 o 1xn donde todos sus elementos son ceros excepto uno que es el uno del campo.
*Considere que están en R3

Un vector canino tiene la siguiente forma:


Recordando esto podemos usarlo para llegar a este pequeño tip:
El Determinante eliminando la fila o columna es igual:
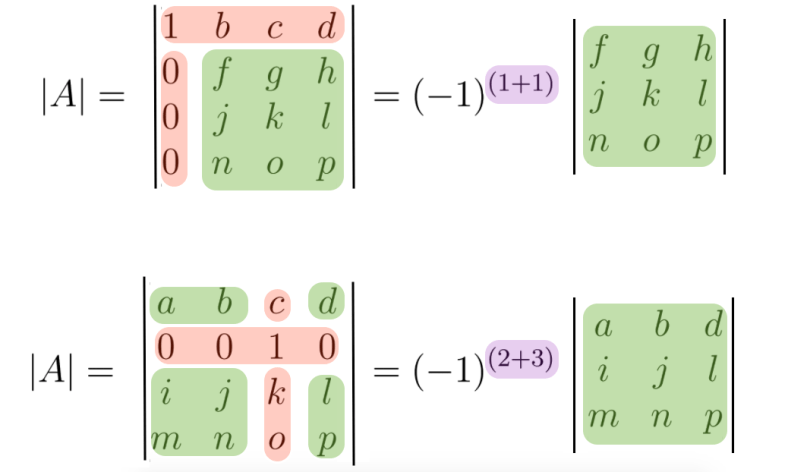
Es decir, al hacer el cofactor de un vector canónico el resultado ES el determinante.
CoFactores
Esta idea la podemos generalizar de esta manera:

Oto elemento muy importante es el menor, que no es más que la Matriz en si del cofactor.

Matriz Adjunta
Es la Matriz de Cofactores transpuesta, así de sencillo, vayamos por pasos mostrando:
Primero Calculemos La Matriz de Cofactores:
Esta matriz es una matriz donde cada elemento es el cofactor de esa posición, veamos un ejemplo:

Tomemos una Matriz y su Determinante
Después hagamos cofactores:

Y esta Matriz (y su transpuesta se vería así):

Y finalmente si dividimos esta matriz entre su determinante, tenemos su inversa:

Teorema Fundamental de las Adjuntas
«La Matriz Original por su Adjunta es la Identidad por el Determinante de la Original»

Regla de Cramer
La regla de Cramer es otra forma que tenemos de encontrar la solución de un sistema lineal de ecuaciones, pero esta vez usando lo que ya sabemos de los determinantes:
Veamos como hacerlo:

Matriz Ampliada cualquiera

Determinantes Necesarias a calcular
Y así las respuestas son tan sencillas como:

Soluciones Pro : p
 |
 |
 |
|
